|
Ministerul Agriculturii şi Dezvoltării Rurale |
|||||
|
Codul ADER și denumirea proiectului: |
ADER 25.2.2, CERCETARE CU PRIVIRE LA PROIECTAREA UNUI ECHIPAMENT INTELIGENT HORTICOL DE ANALIZĂ, PREDICȚIE ȘI ACȚIUNE BIODINAMICĂ |
||||
|
Denumire conducător de proiect |
INSTITUTUL NAŢIONAL DE CERCETARE - DEZVOLTARE PENTRU MAŞINI ŞI INSTALAŢII DESTINATE AGRICULTURII ŞI INDUSTRIEI ALIMENTARE, INMA Bucuresti |
||||
|
Director de proiect (nume, prenume, telefon fix și mobil, e-mail): |
MATACHE Mihai Gabriel, telefon fix (021) 2693250, mobil 0727957693, e-mail: gabimatache@yahoo.com , matache@inma.ro |
||||
|
Denumire partener 1 |
INSTITUTUL DE CERCETARE DEZVOLTARE PENTRU INDUSTRIALIZAREA ȘI MARKETINGUL PRODUSELOR HORTICOLE – HORTING |
||||
|
Responsabil de proiect (nume și prenume, telefon fix și mobil, e-mail): |
Dr. ing. VERINGĂ Daniela, telefon fix (+40 21)461.34.40; mobil (+40) 745148071, e-mail veringa.daniela@yahoo.com |
||||
|
Denumire partener 2 |
STAŢIUNEA DE CERCETARE-DEZVOLTARE PENTRU LEGUMICULTURA BACAU-SCDL Bacau |
||||
|
Responsabil de proiect (nume și prenume, telefon fix și mobil, e-mail): |
CRISTEA Tina Oana telefon fix 0234-544963, mobil 0744772174 e-mail tinaoana@yahoo.com |
||||
|
Denumire partener 3 |
UNIVERSITATEA „DUNAREA DE JOS” DIN GALATI, UDJ-GALATI |
||||
|
Responsabil de proiect (nume, prenume, telefon fix și mobil, e-mail): |
GURAU Marlen Carmela, telefon fix +40336130108 mobil 0720044084, e-mail carmela.gurau@ugal.ro |
||||
|
Anul începerii proiectului: 2019 |
Anul finalizării proiectului : 2022 |
Durata (nr. luni): 36 |
|||
Contractul nr25.2.2/26.09.2019.
Proiectul: ADER 25.2.2 Cercetare cu privire la proiectarea unui echipament inteligent horticol de analiză, predicție și acțiune biodinamică
Obiectivul proiectului: Proiectarea și realizarea unui sistem tehnic inovativ (echipament inteligent ) horticol de analiza, predicție si acțiune biodinamica.
Rezultate preconizate pentru atingerea obiectivului:
- Studiu tehnologic de dezvoltare și execuție a unui echipament electric destinat distribuției tratamentelor fitopatologice pentru culturile de ceapă, morcovi, cartofi, pătrunjel, păstârnac, țelină;
- Studiu tehnologic de dezvoltare a unui sistem hardware-software inovativ pentru managementul fitopatologic al plantelor horticole;
- Documentație de execuție structura mobila acționată electric;
- Documentație de execuție sistem dozare si protecție biologica a plantelor;
- Documentație de execuție sistem hardware;
- Documentație de execuție sistem software;
- Documentație de executie a retelei neurale pentru modelul experimental;
- Model experimental de sistem tehnic inovativ (echipament inteligent ) horticol de analiza, predictie si actiune biodinamica;
- Cerere de brevet;
- Crearea unei platforme digitale inteligentă care va conține noi metode și mijloace de protecție a plantelor.
Faza: nr 1 - Studii tehnologice privind echipamentele electrice de distribuție tratamente si sistemele hardware-software inovative pentru managementul fitopatologic al plantelor horticole (cultura ceapa, morcov, cartof, pătrunjel, păstârnac, țelina)
Termen: 26.09.2019 - 31.10.2019
- Studiu tehnologic: ”Studiu tehnologic de dezvoltare și execuție a unui echipament electric destinat distribuției tratamentelor fitopatologice pentru culturile de ceapă, morcovi, cartofi, pătrunjel, păstârnac, țelină” realizat de către conducătorul de proiect în colaborare cu partenerul 2 și partenerul 3. Coordonatorul de proiect a studiat problematica echipamentelor tehnice și tehnologiilor pentru distribuția tratamentelor fitopatologice și a întocmit tema de proiectare pentru echipamentul electric. Partenerul 2 a studiat problematica fitopatologiei culturilor de ceapă, morcovi, cartofi, pătrunjel, păstârnac, țelină și a furnizat material folosit la realizarea studiului tehnologic. Partenerul 3 a studiat problematica tehnologiilor inteligente de realizarea tratamentelor fitopatologice și a furnizat material folosit la realizarea studiului tehnologic.
- Studiu tehnologic: ”Studiu tehnologic de dezvoltare a unui sistem hardware-software inovativ pentru managementul fitopatologic al plantelor horticole” realizat de către conducătorul de proiect în colaborare cu partenerul 1. Coordonatorul de proiect a studiat problematica tehnologiilor care folosesc vederea artificială în sisteme hardware-software și a stabilit tema de proiectare pentru sistemul hardware-software. Partenerul 1 a studiat problematica managementului fitopatologic al plantelor horticole și a furnizat material pentru realizarea studiului tehnologic.
-Raport de activitate realizat de către conducătorul de proiect.
-Inițializare pagina web proiect (faza 1).
TEMA DE PROIECTARE A SISTEMULUI HARDWARE-SOFTWARE INOVATIV PENTRU MANAGEMENTUL FITOPATOLOGIC AL PLANTELOR HORTICOLE
Destinaţie: sistemul hardware-software inovativ pentru managementul fitopatologic al plantelor horticole este destinat evaluarii stării de sanătate a culturilor horticole și controlului echipamentului electric de realizare a distribuției tratamentelor fitopatologice.
SISTEMUL HARDWARE-SOFTWARE INOVATIV PENTRU MANAGEMENTUL FITOPATOLOGIC AL PLANTELOR HORTICOLE destinat monitorizării distribuției tratamentelor fitopatologice va avea următoarele componenente principale: sistem intrare hardware achizitie imagini, sistem harware-software procesare imagini cu retele neurale, sistem iesire cu semnal de comandă către echipamentul electric.
Principalele caracteristici tehnice pentru echipamentul tehnic propus a se realiza sunt:
|
Caracteristica |
U.M. |
Valoare / caracterizare |
|
Tensiune alimentare |
V |
12-24 Vcc |
|
Camere video |
- |
Min. Color si/sau multispectrale |
|
Unitate centrala de control |
- |
Cu procesoare de imagine pentru procesarea imaginilor culese din câmp și crearea unor pachete de date, stocate pe un server |
|
Iesiri digitale |
- |
Min 12 |
|
Iesiri analogice |
- |
Min 2 |
Faza: nr 2 - Proiectare model experimental de sistem tehnic inovativ (echipament inteligent) horticol de analiza, predictie si actiune biodinamica
Termen: 01.11.2019 - 30.05.2020
Rezultate obținute:
- Documentație de execuție: ”Documentație de execuție structura mobila acționată electric” realizat de către conducătorul de proiect în colaborare cu partenerul 3. Coordonatorul de proiect a proiectat subansamblele mecanice ale structurii mobile acționate electric după cum urmează: SME – 0 Structura mobila acționată electric (ansamblu principal); SME - 1.0 Șasiu; SME 2.0 – Sistem de rulare; SME – 4.0 Carcasă sistem de acționare; SME – 5.0 Cabina. Partenerul 3 proiectat subansamblele electrice ale structurii mobile acționate electric după cum urmează: SME – 3.0 Sistem de acționare electrică și SME – 6.0 Sistem de iluminare si semnalizare.
- Documentație de execuție: ”Documentație de execuție sistem dozare si protecție biologica a plantelor” realizat de către conducătorul de proiect în colaborare cu partenerul 1 si partenerul 2. Coordonatorul de proiect a proiectat subansamblele mecanice ale sistemului de dozare și protecție biologică a plantelor după cum urmează: SDP-0 Sistem de dozare și protecție biologică a plantelor (ansamblu principal); SDP – 1.0 Cadru; SDP – 2.0 Instalație de dozare (formata din componentele principale: bazin, filtru, pompa, distribuitor, duze cu microvalve); SDP – 3.0 Rampa; SDP - 4.0 Instalația electrică de acționare. Partenerul 1 a studiat problematica managementului fitopatologic al plantelor horticole și a participat la alegerea finala a caracteristicilor fizice ale sistemului de dozare și protecție biologică a plantelor. Partenerul 2 a colaborat cu coordonatorul de proiect la proiectarea instalației electrice de acționare SDP - 4.0 și la proiectarea microvalvelor de control al duzelor.
-Raport de activitate realizat de către conducătorul de proiect.
-Actualizare pagina web proiect (faza 2).
În cadrul fazei 2 a proiectului, pe baza cerințelor de proiectare pentru echipamentul electric destinat distribuției tratamentelor fitopatologice pentru culturile de ceapă, morcovi, cartofi, pătrunjel, păstârnac, țelină, s-a realizat proiectul modelului experimental de Sistem Tehnic Inovativ (Echipament Inteligent) Horticol De Analiza, Predicție si Acțiune Biodinamica, simbolizat SIH – 0. Acesta este un echipament electric destinat distribuției tratamentelor fitopatologice format din următoarele ansambluri principale: Structură mobilă acționată electric simbolizat SME – 0 și Sistem dozare si protecție biologica a plantelor simbolizat SDP -0. În conformitate cu planul de realizare a proiectului, în cadrul activităților 2.1 respectiv 2.2 s-au realizat documentațiile de execuție pentru cele două ansambluri principale.
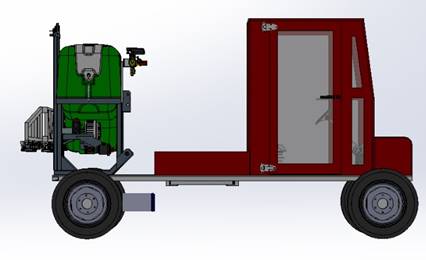
În figura 1 se prezinta ansamblul general al structurii mobile acționate electric, SME -0, formată din următoarele elemente componente: șasiu, sistem de rulare, sistem de acționare electric, carcasă și cabina operatorului.
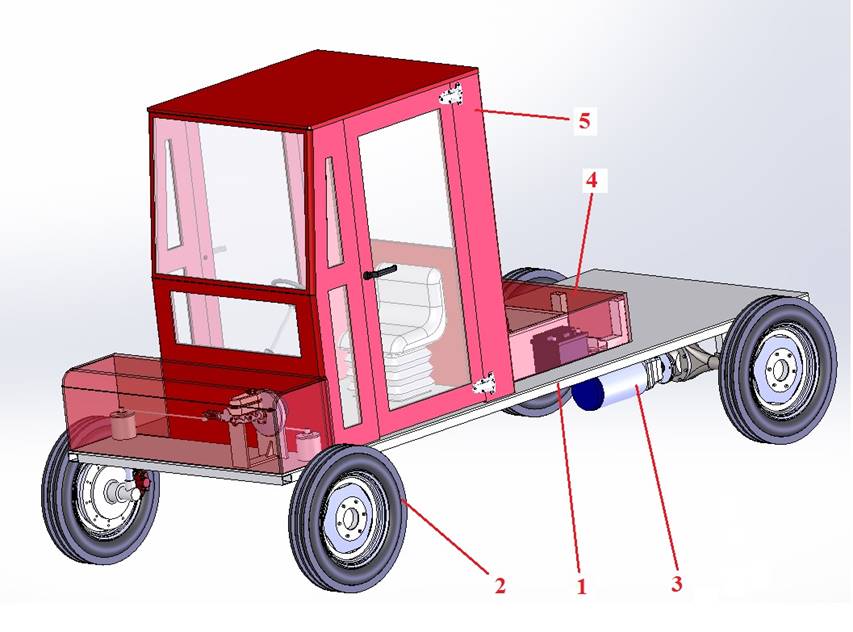
Fig. 1 Structură mobilă acționată electric – model 3D:
1 - șasiu; 2 - sistem de rulare; 3 - sistem de acționare electric; 4 - carcasă; 5 - cabina
În figura 2 se prezinta ansamblul general al sistemului de dozare si protectie biologica a plantelor, SDP -0, format din următoarele elemente componente: cadru, instalație de dozare, structura rampă și instalație electrică de acționare.
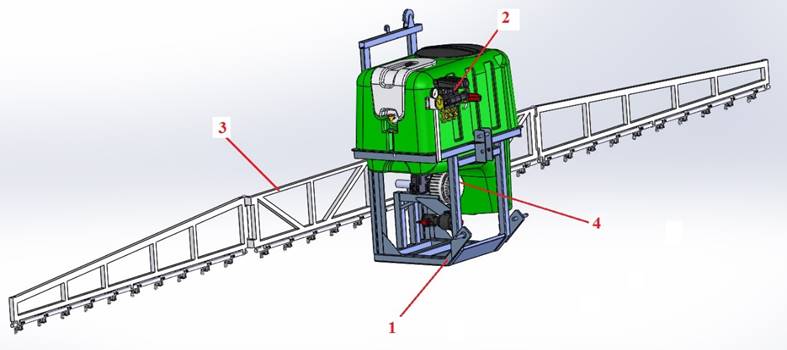
Fig. 2 Sistem de dozare și protecție biologică a plantelor – model 3D:
1 - cadru, 2 - instalație de dozare,3 - structura rampă, 4 - instalație electrică de acționare
Model experimental de Sistem Tehnic Inovativ (Echipament Inteligent) Horticol De Analiza, Predictie Si Actiune Biodinamica SIH – 0 – concept 3D
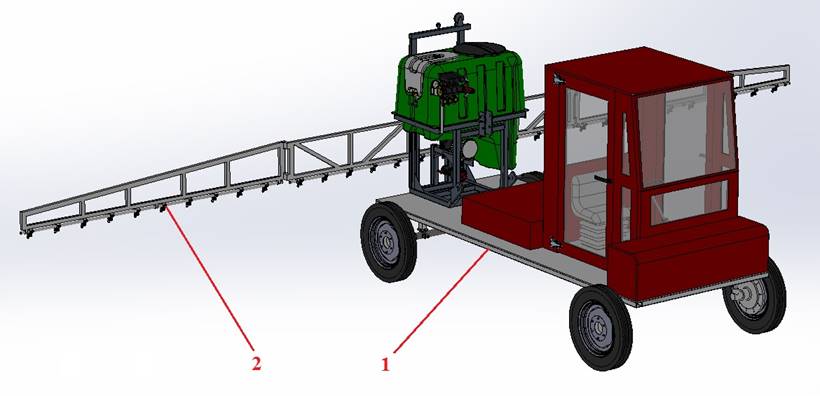
Fig. 3 Sistem tehnic inovativ horticol de analiză, predicție și acțiune biodinamică:
1 - structură mobilă acționată electric SME; 2 - sistem de dozare și protecție biologică a plantelor SDP
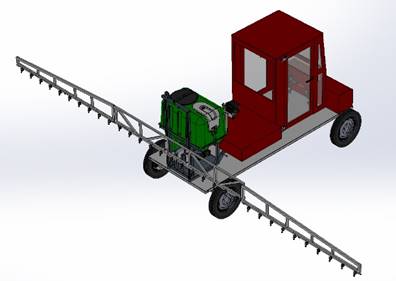
a) b)
Fig. 4 Sistem tehnic inovativ horticol de analiză, predicție și acțiune biodinamică, a - vedere izometrica și b - din lateral
Faza: nr 3 - Proiectare sistem hardware-software, retea neurala pentru modelul experimental de sistem tehnic inovativ (echipament inteligent ) horticol de analiza, predictie si actiune biodinamica
Termen: 01.06.2020 - 29.10.2020
Rezultate obținute:
- Documentație de execuție: ”Documentație de execuție sistem hardware” realizat de către conducătorul de proiect în colaborare cu partenerul P1 – ICDIMPH-Horting și partenerul 3 UDJ-Galati. Coordonatorul de proiect a proiectat sistemul de dozare prin microvalve al necesarului de substanțe nutritive, în urma observațiilor efectuate. Partenerul 1 a participat la proiectarea și alegerea sistemului de procesoare de imagine on line cu camere inteligente pe baza culturilor de leguminoase urmărite. Partenerul 3 a proiectat sistemul de procesoare de imagine pentru procesarea imaginilor culese din câmp cu drona agricolă.
- Documentație de execuție: ”Documentație de execuție sistem software” realizat de către conducătorul de proiect în colaborare cu partenerul 2 P2 – SCDL Bacău si partenerul 3 UDJ-Galati. Coordonatorul de proiect a proiectat software-ul necesar pentru interfața grafică și pentru calculatorul instalației sub forma unui PLC. Partenerul 2 a realizat o colecție de imagini cu bolile specifice unor specii de leguminoase studiate, colecție care se va folosi pentru antrenarea rețelei neurale și a participat la elaborarea cerințelor de proiectare a software-ului care va fi instalat în procesoarele de imagine de tip cameră inteligentă. Partenerul 3 a colaborat cu coordonatorul de proiect la proiectarea software-ului de realizare a orthofotogramelor culturilor și la stabilirea indicilor de vegetație urmăriți.
- Documentație de execuție: ”Documentație de execuție a rețelei neurale pentru modelul experimental” realizat de către conducătorul de proiect în colaborare cu partenerul 3 UDJ-Galati. Coordonatorul de proiect a stabilit caracteristicile pozelor care trebuie urmărite de rețeaua neuronală pe baza colecției de imagini cu boli realizată de către partenerul P2. Partenerul 3 a proiectat arhitectura rețelei neuronale de clasificare a plantelor de cultură pentru modelul experimental.
-Raport de activitate realizat de către conducătorul de proiect.
-Actualizare pagina web proiect (faza 3).
Sistemul hardware proiectat este format din:
-A. procesoare de imagine care au ca scop procesarea imaginilor culese din câmp și crearea unor pachete de date, stocate pe un server;
-B. sistem de dozare prin microvalve al necesarului de substanțe nutritive, în urma observațiilor efectuate.
Principalele elemente componente ale sistemului de dozare prin microvalve al necesarului de substanțe nutritive sunt următoarele:
1. PLC din seria FX5U 1 buc
2. Terminal de operare din seria GOT 2000 1 buc
3. Microvalve de tip JSX11-SN201F-6G 32 buc
4. Relee intermediare de acționare microvalve: 32 buc
5. Procesoare de imagine de tip smart camera tip NI 1774C 2 buc
Sistemul hardware este proiectat să funcționeze interdependent cu Sistemul software astfel încât cele două formează un echipament capabil să controleze Modelul experimental de Sistem Tehnic Inovativ (Echipament Inteligent) Horticol De Analiza, Predictie Si Actiune Biodinamica SIH – 0.
În aceste condiții Sistemul hardware SH 0 are următorul mod de funcționare: procesoarele de imagine PI de tip camera inteligenta color vor procesa în timp real imaginile capturate în timp real de pe șasiul modelul experimental de sistem tehnic inovativ (echipament inteligent ) horticol de analiza, predicție si acțiune biodinamică de dozare și protecție biologica a plantelor SIH-0, astfel încât să identifice lățimea brazdelor de leguminoase sau distanța dintre rânduri. Ulterior vor comunica această informație controller-ului PLC din cadrul sistemului hardware care va acționa în consecință releele de comadă a microvalvelor sistemului de dozare. De asemenea la PLC se va trimite și informație corespunzătoare vitezei de deplasare a mașinii agricole astfel încât acesta, aplicând o serie de aproximări de funcții și predicții ale unor serii temporale va comanda presiunea de lucru corespunzător normei de aplicare, prin comanda invertorului motorului de acționare a pompei sistemului de dozare și protecție biologică a plantelor SDP.
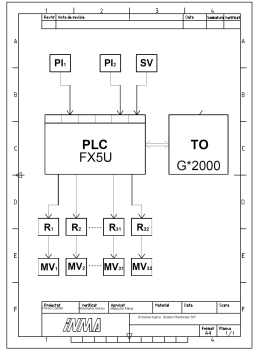
Fig. 5. Schema logică de funcționare a sistemului hardware
Sistemul software proiectat în cadrul activității A3.2 este format dintr-o serie de programe dedicate realizate pentru setarea și controlul componentelor Sistemului hardware și al Rețelei neuronale. Astfel, s-au proiectat: interfața grafică cu utilizatorul care se va instala pe terminalul de operare din seria GOT2000, aplicația PLC-ului de control a sistemului de dozare, secvența de preluare imagini și procesare care se va instala în buclă închisă în procesoarele de imagini PI, metodologia de analiză și prelucrare a imaginilor preluate cu drona, analiza realizată cu rețeaua neuronală asupra rezultatelor obținute cu drona.
În figura 6 este prezentată diagrama de interacțiuni dintre programele proiectate și amintite anterior.
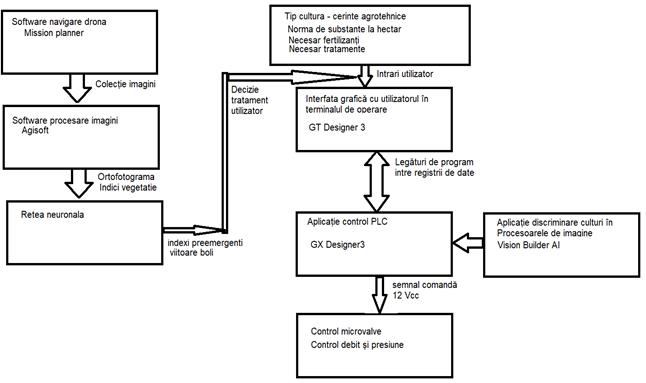
Fig.
6. Diagrama interacțiuni software
Faza: nr 4 - Realizare model experimental de sistem tehnic inovativ (echipament inteligent) horticol de analiză, predicție si acțiune biodinamica
Termen: 30.10.2020 - 28.05.2020
Rezultate obținute:
- Execuția modelului experimental: ”Structură mobilă acționată electric” realizat de către conducătorul de proiect în colaborare cu partenerul 3. Coordonatorul de proiect a realizat subansamblele mecanice ale structurii mobile acționate electric după cum urmează: SME – 0 Structura mobila acționată electric (ansamblu principal); SME - 1.0 Șasiu; SME 2.0 – Sistem de rulare; SME – 4.0 Carcasă sistem de acționare; SME – 5.0 Cabina, SME – 3.0 Sistem de acționare electrică și SME – 6.0 Sistem de iluminare si semnalizare. Partenerul 3 a dat asistență tehnică la realizarea subansamblele electrice ale structurii mobile acționate electric după cum urmează: SME – 3.0 Sistem de acționare electrică și SME – 6.0 Sistem de iluminare si semnalizare.
- Execuția modelului experimental: ”Sistem dozare si protecție biologica a plantelor” realizat de către conducătorul de proiect în colaborare cu partenerul 1 si partenerul 2. Coordonatorul de proiect a realizat subansamblele mecanice ale sistemului de dozare și protecție biologică a plantelor după cum urmează: SDP-0 Sistem de dozare și protecție biologică a plantelor (ansamblu principal); SDP – 1.0 Cadru; SDP – 2.0 Instalație de dozare (formata din componentele principale: bazin, filtru, pompa, distribuitor, duze cu microvalve); SDP – 3.0 Rampa; SDP - 4.0 Instalația electrică de acționare. Partenerul 1 a dat asistență tehnică la realizarea instalației electrice de acționare SDP - 4.0.
Partenerul 2 a dat asistență tehnică la realizarea microvalvelor de control al duzelor. De asemenea a identificat tratamentele fitopatologice ale plantelor horticole care vor fi aplicate folosind sistemul de dozare și protecție biologică a plantelor..
-Raport de activitate realizat de către conducătorul de proiect.
-Actualizare pagina web proiect (faza 4).
Aspecte din timpul executării componentelor Structurii mobile acționate electric
La realizarea componentelor structurii mobile acționate electric a fost utilizată infrastructura de execuţie existentă ȋn cadrul INMA Bucureşti, fig. 7, ȋn care sunt identificate operaţiile realizate, de la analiza documentaţiei de execuţie 2D, la realizarea reperelor pe freză, strung, maşina de găurit, maşina de prelucrat ȋn coordonate, abkant, CNC debitat cu laser, urmat de asamblarea prin sudură, unde a fost cazul, finalizând cu vopsirea componentelor.






Fig. 7- Aspecte din timpul realizării componentelor structurii mobile acționate
Modelul experimental de Sistem Tehnic Inovativ (Echipament Inteligent) Horticol De Analiza, Predicție și Acțiune Biodinamica SIH – 0

Fig. 8 - Sistem tehnic inovativ horticol de analiză, predicție și acțiune biodinamică (aspecte din timpul executiei):
1 - structură mobilă acționată electric SME; 2 - sistem de dozare și protecție biologică a plantelor SDP
Caracteristici tehnice
Principalele caracteristici tehnice ale modelului experimental de Sistem Tehnic Inovativ (Echipament Inteligent) Horticol De Analiza, Predicție si Acțiune Biodinamica SIH – 0 sunt:
|
Caracteristica |
U.M. |
Valoare / caracterizare |
|
Ecartament roți spate |
mm |
1320 |
|
Ampatament |
mm |
2600 |
|
Motor electric acționare |
kW |
12 |
|
Baterie li-ion |
Vcc |
96 |
|
Capacitatea rezervorului de soluție |
l |
400 l |
|
Motor pompa |
kW |
3 |
|
Debitul maxim al pompei |
l /min |
86 l/min |
|
Presiunea maximă de lucru |
bar |
20 bar |
|
Sistem de agitaţie |
- |
cu agitator hidraulic |
|
Lungimea rampei |
m |
8 |
|
Nr. tronsoane rampă |
- |
3 |
|
Nr. portduze și microvalve |
- |
31 |
|
Regulator de presiune şi debit |
- |
cu 3 căi |
Faza: nr 5 - Realizare sistem hardware-software, retea neurala pentru modelul experimental de sistem tehnic inovativ (echipament inteligent) horticol de analiza, predictie si actiune biodinamica
Termen: 31.05.2021 - 28.10.2021
Rezultate obținute:
- Execuția Sistemului hardware pentru modelul experimental realizat de către conducătorul de proiect în colaborare cu partenerul P1 – ICDIMPH-Horting și partenerul 3 UDJ-Galati. Coordonatorul de proiect a realizat sistemul hardware și partenerii au dat asistență tehnică la execuție.
- Execuția Sistemului software pentru modelul experimental realizată de către conducătorul de proiect în colaborare cu partenerul 2 P2 – SCDL Bacău si partenerul 3 UDJ-Galați. Coordonatorul de proiect a realizat software-ul necesar pentru interfața grafică și pentru calculatorul instalației sub forma unui PLC. Partenerul 2 a realizat o colecție de imagini cu dăunătorii specifici unor specii de leguminoase studiate, colecție care se va folosi pentru antrenarea rețelei neurale și a dat asistență tehnică la realizarea software-ului care va fi instalat în procesoarele de imagine de tip cameră inteligentă. Partenerul 3 a colaborat cu coordonatorul de proiect la realizarea software-ului PLC în scopul realizării corelării acestuia cu datele primite de la rețeaua neuronală.
- Execuția Rețelei neurale pentru modelul experimental, realizat de către conducătorul de proiect în colaborare cu partenerul 3 UDJ-Galati. Partenerul 3 a realizat arhitectura rețelei neuronale de clasificare a plantelor de cultură și identificarea buruienilor pentru modelul experimental. Coordonatorul de proiect a dat asistență la realizarea rețelei neuronale și a hardware-ului de implementare a acesteia.
- Raport de activitate realizat de către conducătorul de proiect.
- Cerere de brevet.
- Actualizare pagina web proiect (faza 5).
La realizarea componentelor Sistemului hardware a fost utilizată infrastructura de execuţie existentă ȋn cadrul INMA Bucureşti, ȋn care sunt identificate operaţiile realizate, de la analiza documentaţiei de execuţie 2D, la realizarea cablajelor și a conexiunilor electrice, a suporților și panourilor elementelor de automatizare precum și la realizarea conexiunilor electrice la sistemul de tensiune al platformei mobile acționate electric.
Principalele elemente componente ale sistemului hardware sunt următoarele:
1. PLC din seria FX5U 1 buc
2. Terminal de operare din seria GOT 2000 1 buc
3. Microvalve de tip JSX11-SN201F-6G 32 buc
4. Relee intermediare de acționare microvalve
5. Procesoare de imagine de tip smart camera tip NI 1774C 2 buc
Software interfață grafică cu utilizatorul
Acest software se instalează în memoria terminalului de operare de tip GOT2000 și are rol de a realiza o interfațare între utilizator și echipamentul de dozare a substanțelor fertilizante și de tratament. Prin intermediul acestuia utilizatorul poate stabili parametrii de lucru, cum ar fi: modul de funcționare al echipamentului (manual sau automat), norma de substanță la hectar, presiunea de lucru, monitorizarea funcționării corespunzătoare a echipamentului, pornirea și oprirea funcționării. Mediul de programare folosit pentru dezvoltarea interfeței grafice a fost GX Designer3.
Prima pagină a software-ului instalat în terminalul de operare permite utilizatorului setarea datelor de intrare corespunzătoare procesului de lucru ales. Astfel, acesta are posibilitatea introducerii normei de lucru la hectar dorite, a presiunii de lucru dorite precum si a vitezei impuse sau poate introduce doar norma, restul fiind calculate de PLC. Aceste date sunt introduse valoric atingându-se registrul numeric corespunzător, sub forma unor numere reale, cu două zecimale. Butoanele ”manual” și ”automat” sunt switch-uri ”go to screen” și permit alegerea modului de lucru, respectiv trecerea în pagina de program corespunzătoare acelui mod de lucru.
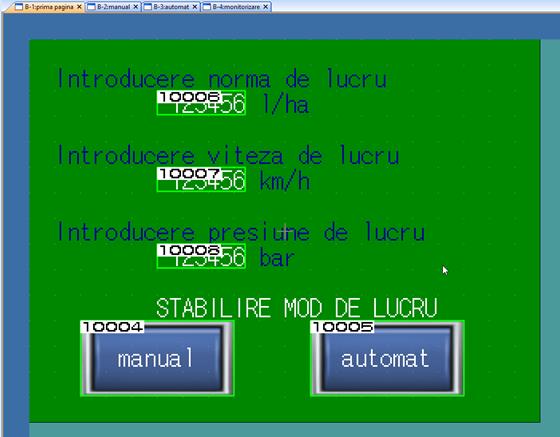
Fig.9 Prima pagină software interfață grafică
Software control PLC
PLC -ul sau controlerul logic programabil reprezintă creierul sistemului hardware, iar software-ul de comandă al acestuia va realiza corelarea datelor de intrate primite de la senzori și de la terminalul de operare cu algoritmii de comandă programați și cu comenzile elementelor de execuție (invertor motor acționare pompa sistem dozare și relee intermediare microvalve) prin implementarea unei serii de aproximări de funcții și predicții ale unor serii temporale.
Astfel, toate semnalele de la senzori sunt mai întâi preluate de către PLC, mediate și filtrate și apoi afișate de terminalul de operare. În scopul inițierii programului PLC-ului a fost setat un nou program in cadrul mediului de dezvoltare GX Works 3.
În figura 10 se prezintă modul de control manual al microvalvelor, pe baza input-ului utilizatorului din interfața grafică. Astfel fiecare dintre ieșirile pe tranzistor Y0-Y37 vor energiza bobina releelor intermediare, astfel încât acestea să alimenteze microvalvele corespunzătoare, în urma comenzilor manuale ale bit-switch-urilor digitale M2-M31.
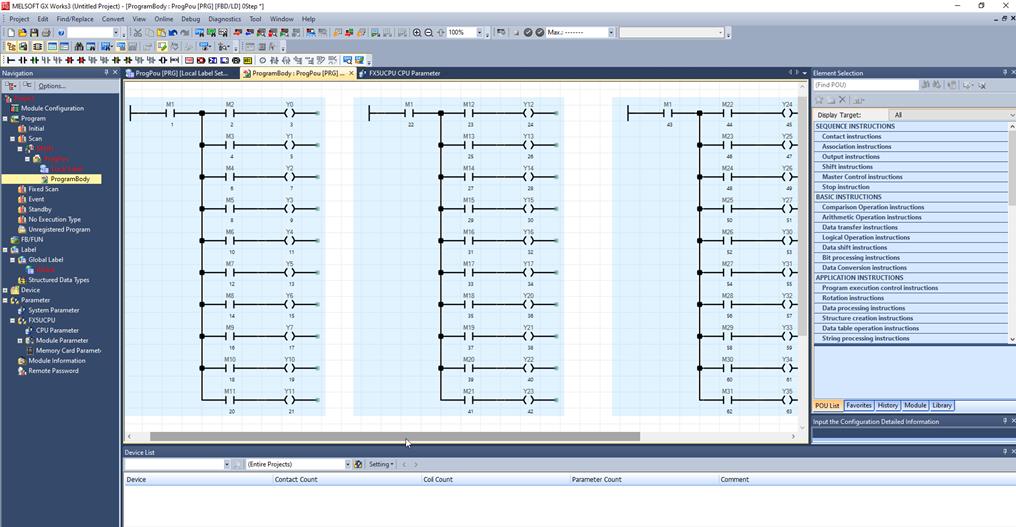
Fig.10 Mod control manual
Software-ul care realizează procesarea imaginilor a fost realizat în Visual Studio folosind librăriile Keras pentru procesarea cu reţea neuronală.
În Fig. 11 sunt prezentate rezultatele privind sarcina de identificare realizata de cercetătorii din cele două echipe implicate în proiect.
Imaginea originală dobândită de camera arată o scenă complexă, unde culoarea comună între plantă (praz) și buruieni face foarte dificilă recunoașterea buruienilor.
Cu toate acestea, algoritmul de viziune pe computer bazat pe rețele neuronale profunde permite identificarea petelor de buruieni cu rezultate bune. Cu roșu este descris, automat, prin zone în care buruienile sunt identificate și trebuie pulverizate.

Fig. 11 Interfața software-ului realizat
Faza: nr 6 - Experimentare model experimental de sistem tehnic inovativ (echipament inteligent) horticol de analiza, predictie si actiune biodinamica; Definitivare constructivă
Termen: 29.10.2021 - 30.05.2022
Rezultate obținute:
- Raport de experimentare model experimental de sistem tehnic inovativ (echipament inteligent) horticol de analiza, predicție si acțiune biodinamica realizat de către conducătorul de proiect în colaborare cu partenerul P1 – ICDIMPH-Horting, partenerul 2 P2 – SCDL Bacău și partenerul 3 UDJ-Galați. Coordonatorul de proiect a realizat experimentarea în condiții de laborator și câmp și partenerii au participat la realizarea experimentărilor.
- Definitivarea constructivă a modelului experimental, realizată de către conducătorul de proiect
-Raport de activitate realizat de către conducătorul de proiect.
-Actualizare pagina web proiect (faza 6).
Modelul experimental de SISTEM TEHNIC INOVATIV (ECHIPAMENT INTELIGENT ) HORTICOL DE ANALIZA, PREDICȚIE SI ACȚIUNE BIODINAMICĂ DE DOZARE ȘI PROTECȚIE BIOLOGICA A PLANTELOR SIH-0 dotat cu KIT-ul de sistem hardware-software, rețea neurala pentru modelul experimental de sistem tehnic inovativ (echipament inteligent) horticol de analiza, predicție si acțiune biodinamica SHS-0 este un echipament electric destinat distribuției tratamentelor fitopatologice pentru culturile de ceapă, morcovi, cartofi, pătrunjel, păstârnac, țelină.
În cadrul activității A 6.1– Experimentare ME sistem tehnic inovativ - realizată de către INMA Bucureşti – CP în colaborare cu partenerul P1 – ICDIMPH-Horting, partenerul P2 – SCDL Bacău și partenerul 3 UDJ-Galati s-au realizat experimentările în condiții de laborator și de câmp ale SISTEMULUI TEHNIC INOVATIV (ECHIPAMENT INTELIGENT ) HORTICOL DE ANALIZA, PREDICȚIE SI ACȚIUNE BIODINAMICĂ DE DOZARE ȘI PROTECȚIE BIOLOGICA A PLANTELOR SIH-0.
Rezultatele planificate au fost realizate integral, rezultatele științifice şi tehnice fiind concretizate prin realizarea raportului de experimentare, iar cele referitoare la cheltuieli în conformitate cu devizele şi centralizatoarele de cheltuieli.
Colectivele de lucru alcătuite din cercetători şi ingineri de dezvoltare tehnologică din cadrul coordonatorului şi ale partenerilor P1, P2 și P3, au executat experimentările în conformitate cu Planul de realizare și cu documentația de execuție aferentă.
SISTEMUL TEHNIC INOVATIV (ECHIPAMENT INTELIGENT) HORTICOL DE ANALIZA, PREDICTIE SI ACTIUNE BIODINAMICA este format din:
1. structură mobilă acționată electric SME;
2. sistem de dozare și protecție biologică a plantelor SDP
Și este dotat cu un KIT de sistem hardware-software, rețea neurala pentru controlul automat al funcționalității acestuia.

Fig.12 - Sistem tehnic inovativ (echipament inteligent) horticol de analiza, predicție si acțiune biodinamica – model experimental
Determinarea parametrilor constructivi şi funcționali
Determinarea lungimii, lățimii şi înălțimii
Lungimea, lățimea şi înălțimea s-au determinat prin măsurare cu ruleta, vehiculul fiind așezat pe o suprafață netedă, dură şi orizontală, la care a fost admisă o înclinare longitudinală şi transversală de max. 0,5%.
|
Nr. crt. |
Caracteristica |
U.M. |
Valoarea parametrilor determinați la încercări |
|
|
1. |
Lungime |
mm |
4480 mm |
|
|
2. |
Lățime |
mm |
2740 mm |
|
|
3. |
Înălțime |
mm |
2320 mm |
|
|
4. |
Ampatament |
mm |
2600 mm |
|
|
5. |
Ecartament față |
mm |
1280 mm |
|
|
6. |
Ecartament spate |
mm |
1320 mm |
Determinarea timpului de încărcare a bateriilor
Timpul de încărcare a bateriilor s-a măsurat cu ajutorul unui multimetru și un cronometru dar și cu ajutorul interfeței de comunicație cu PC-ul conectată la BMS. S-au determinat timpii de încărcare corespunzători celor trei regimuri de alimentare.
|
Nr crt. |
Caracteristica |
U.M. |
Valoarea parametrilor determinați la încercări baterie 96 Vcc structură mobilă acționată electric |
||
|
1. |
Alimentare de la 220V 6A |
Ore |
5,6 |
5,8 |
5,6 |
|
2. |
Alimentare de la 220V 16A |
Ore |
2,07 |
2,09 |
2,05 |
|
3. |
Alimentare de la 220V 32A |
Minute |
59 |
58 |
58 |
|
Nr crt. |
Caracteristica |
U.M. |
Valoarea parametrilor determinați la încercări baterie 48 Vcc sistem de dozare și protecție biologică a plantelor |
||
|
1. |
Alimentare de la 220V 6A |
Ore |
2,8 |
2,7 |
2,8 |
|
2. |
Alimentare de la 220V 16A |
Minute |
63 |
61 |
63 |
|
3. |
Alimentare de la 220V 32A |
Minute |
33 |
32 |
33 |
Determinarea zgomotului (nivelului presiunii acustice) în jurul mașinii şi la urechea operatorului
Condiţii de încercare - conform REGULAMENTUL DELEGAT (UE) 2015/208 al Parlamentului European și al Consiliului în ceea ce privește cerințele de siguranță în funcționare a vehiculului pentru vehiculele agricole și forestiere, "Anexa XVI.
REGULAMENTUL DELEGAT (UE) NR. 1322/2014 cu privire la construcția vehiculelor și cerințele generale pentru omologarea de tip a vehiculelor agricole și forestiere, Anexa XIII.
- mașina în gol;
- masa totală la încercări [kg]: 890 (inclusiv conducător, 75kg);
- zgomotul de fond [dB A]: 44,7
- temperatura atmosferică: [0 C]: 27,8
- presiunea atmosferică: hPa (mm col Hg): 1010,9
- viteză vânt: [ m/s]: 1,19
Măsurarea zgomotului s-a făcut pe o suprafață orizontală curată şi uscată din cadrul pistei de încercări experimentale a INMA București.
La intrarea modelului experimental în sectorul de măsurare, pedala de accelerație s-a apăsat în poziția maximă şi s-a eliberat în momentul ieșirii din sector.
Microfonul s-a așezat la o înălțime de 1,2 m față de sol. Zgomotul de fond a fost cu cel puţin 10 dB(A) mai mic decât cel măsurat. Nivelul zgomotului în jurul modelului experimental SIH-0 este detaliat în tabelul 4.
|
Valori admise |
Valori determinate |
|
|
Viteza de intrare în test / viteză de testare km/h |
treapta corespunzătoare la ¾ din Vmax dar cu motorul neambalat / aceeași treaptă cu motorul ambalat la maxim |
cca. 18.75/25 (treapta a IV a) |
|
Nivel zgomot exterior, dB (A) |
89 pentru mt > 1,5 t |
58.7 stânga 58.6dreapta |
|
Observaţii: Zgomotul în jurul modelului experimental SIH-0 corespunde cerințelor |
||
Determinarea autonomiei
Tabelul urmator prezintă datele corespunzătoare autonomiei modelului experimental SIH-0 cu o singură încărcare a bateriei de 6,7 kWh. Productivitatea lucrării de stropire a fost calculată folosind viteze de lucru reale măsurate în timpul experimentelor și lățimea de lucru de 8 m a mașinii. De asemenea, suprafața totală a fost calculată ca productivitatea lucrării de stropire înmulțită cu autonomia mașinii, considerând ipoteza de a lucra în linie dreaptă, fără a ține cont de timpul necesar pentru a întoarce mașina la capătul câmpului.
Sistemul tehnic inovativ (echipament inteligent) horticol de analiză, predicție si acțiune biodinamică a fost experimentat și în teren, cu toate microvalvele pornite în modul de lucru MANUAL, fiind dotat cu duze de fertilizare foliară și fiind folosit pentru aplicarea de fertilizant ecologic pe o cultură verde. Scopul experimentărilor a fost de a verifica funcționalitatea mașinii în teren, autonomia și comportamentul acesteia în sarcină maximă.
|
Lucrare |
Autonomie structură mobilă acționată electric, h |
Autonomie sistem de dozare și protecție biologică a plantelor, h |
|
Deplasare |
3.00 |
- |
|
Fertilizare foliară/tratamente fitosanitare |
2.5 |
2.5 |

Fig.13 – Modelul experimental – experimentări în câmp cu duze de fertilizare
Determinarea indicilor calitativi de lucru
Debitul pompei şi randamentul volumetric al pompei
Debitul pompei, s-a determinat de către asistentul de încercări prin metoda volumetrică la turaţia de intrare de 540 rot/min. Lichidul debitat de pompă s-a captat prin furtunurile ce îl conduc la lănci timp de 1 minut într-un vas şi s-a măsurat cu unități de capacitate din dotarea laboratorului. Probele au fost efectuate la presiunea de 2 bar.
|
Presiune (bar) |
Debit la pompă (l/min) |
Incertitudine de măsurare |
Randament volumetric (%) |
Incertitudine de măsurare |
|||
|
2 |
R1 |
R2 |
R3 |
Media |
|
|
|
|
28,3 |
28,1 |
27,6 |
28 |
0,42 l/min |
17,85 |
0,42 % |
|
Determinarea uniformității de distribuție folosind duze de erbicidare
Sistemul tehnic inovativ (echipament inteligent) horticol de analiză, predicție si acțiune biodinamică a fost dotat cu duze de erbicidare de tip 03 (albastre).
Determinarea uniformității distribuției transversale la mașinile de stropit în culturile de bază s-a făcut cu aparatura de măsurare formată dintr-un scaner cu 20 jgheaburi (rine) cu lățimea de 100 mm şi adâncimea de 80 mm (distanță măsurată între marginea superioară şi fundul jgheabului).
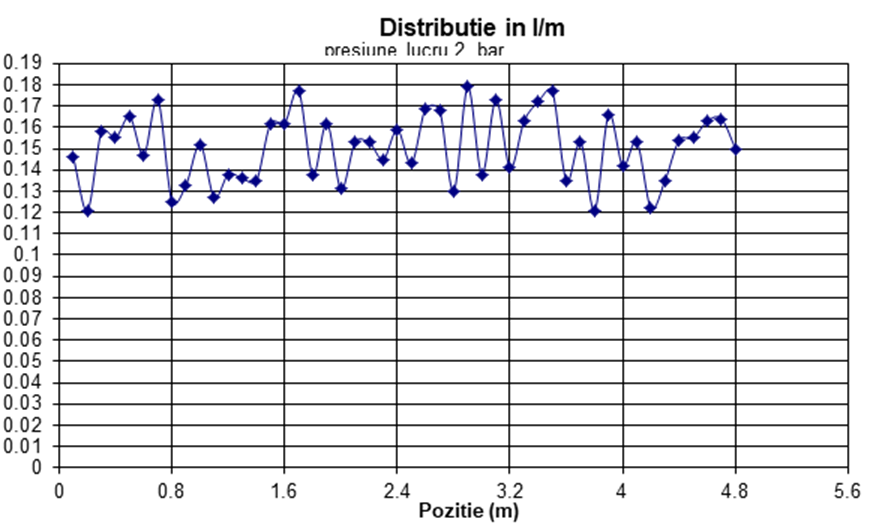
Fig.14– Diagrama uniformității de distribuție a modelului experimental SIH-0 – probe pe stand – presiune de lucru 2 bar – valoare medie
Experimentarea funcționalității rețelei neuronale
Rețeaua neuronală a fost testată timp de 4 zile consecutive, cu luminozitate diferită, pe aceleaşi rânduri de plante de tip ceapă. Deşi poziţia relativă faţă de camera pentru aceeaşi locaţie a plantelor a fost diferită, în cele 10 treceri efectuate, datorită faptului că nu s-a putut reproduce aceeaşi traiectorie de fiecare dată şi pentru că plantele îşi schimbă poziţia datorită factorilor de vreme, precum şi pentru faptul că au crescut în intervalul de 4 zile, testarea algoritmului în acest mod pentru a verifica robusteţea la variaţia de luminozitate a fost utilă.
Aşa cum se arată în figură de mai jos, chiar în condiţiile în care în scena apar resturi vegetale uscate, iar plantă de cultură (ceapă) este uscată parţial, algoritmul funcţionează fără a provoca identificări de tipul fals – pozitiv.
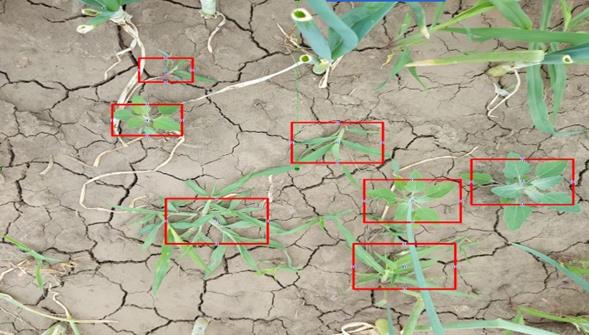
Fig. 15 - Identificarea în cazul existenţei resturilor vegetale
În figura 16 se observă funcţionarea algoritmului chiar în condiţiile în care datorită unei nealineri ale rândului, camera nu este poziţionată deasupra intervalelor dintre rândurile de plante, ci este poziţionată deasupra rândului. Această situaţie apare frecvent, în situaţii reale, când datorită unor condiţii tehnice ale solului, rândul nu este drept. Algoritmul realizat funcţionează cu rezultate foarte bune chiar şi în această situaţie.
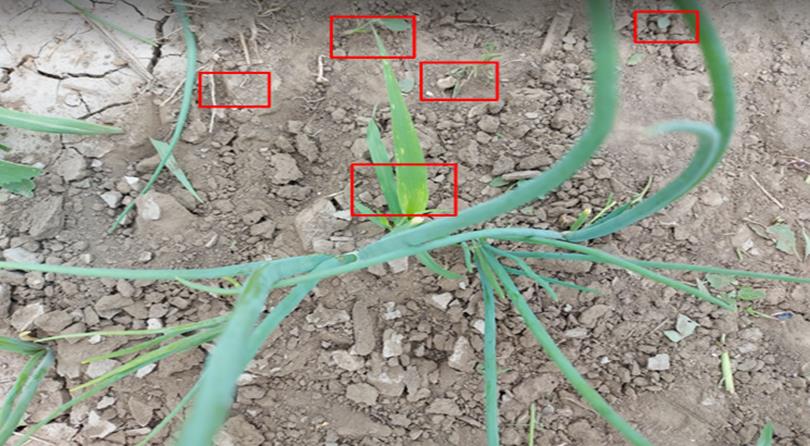
Fig. 16 - Identificarea in cazul in care camera este deasupra plantei de cultura